%matplotlib inline
import matplotlib.pyplot as plt
plt.style.use('../settings/plot_style.mplstyle')
import numpy as np
import pandas as pd
clrs = np.array(['#003057', '#EAAA00', '#4B8B9B', '#B3A369', '#377117', '#1879DB', '#8E8B76', '#F5D580', '#002233'])
8.4. Alternate classification methods#
In the prior lectures we have discussed discriminative “generalized linear” models in depth, and derived and studied the “support vector machine” model. In this lecture we will look at some fundamentally different approaches to the classification problem. While we will not derive these methods or study them in depth, we will introduce the key concepts and see how they work for the toy datasets.
from sklearn.datasets.samples_generator import make_blobs, make_moons, make_circles
np.random.seed(1) #make sure the same random samples are generated each time
noisiness = 1
X_blob, y_blob = make_blobs(n_samples=200, centers=2, cluster_std=2*noisiness, n_features=2)
X_mc, y_mc = make_blobs(n_samples=200, centers=3, cluster_std=0.5*noisiness, n_features=2)
X_circles, y_circles = make_circles(n_samples=200, factor=0.3, noise=0.1*noisiness)
X_moons, y_moons = make_moons(n_samples=200, noise=0.1*noisiness)
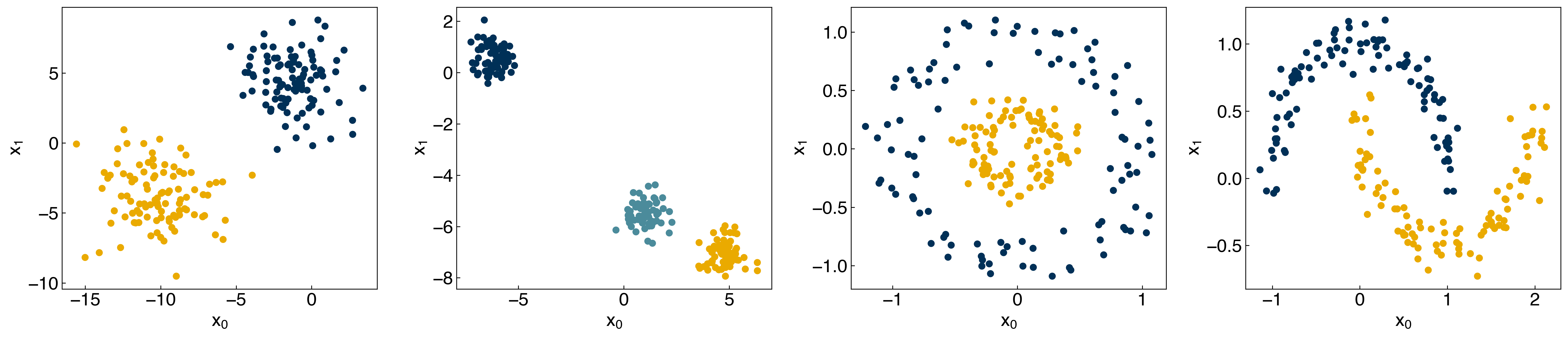
fig, axes = plt.subplots(1, 4, figsize=(22, 5))
all_datasets = [[X_blob, y_blob],[X_mc, y_mc], [X_circles, y_circles],[X_moons, y_moons]]
for i, Xy_i in enumerate(all_datasets):
Xi, yi = Xy_i
axes[i].scatter(Xi[:,0], Xi[:,1], c = clrs[yi])
axes[i].set_xlabel('$x_0$')
axes[i].set_ylabel('$x_1$')
plt.show()
/Users/SihoonChoi/opt/anaconda3/lib/python3.7/site-packages/sklearn/utils/deprecation.py:143: FutureWarning: The sklearn.datasets.samples_generator module is deprecated in version 0.22 and will be removed in version 0.24. The corresponding classes / functions should instead be imported from sklearn.datasets. Anything that cannot be imported from sklearn.datasets is now part of the private API.
warnings.warn(message, FutureWarning)
8.4.1. k-Nearest Neighbors#
An alternative non-linear classification method is the k-nearest neighbors algorithm. This operates on a principle that is very easy to understand: democracy.
The class of a point is determined by letting its k-nearest neighbors “vote” on which class it should be in. The point is assigned to whichever class has the most votes. In the case of a tie, k is decreased by 1 until the tie is broken.
The advantage of democracy is that it is “nonlinear” - we can distinguish classes with very complex structures.
We need 3 functions to implement kNN:
distance metric - calculate the distance between 2 points. We will use the Euclidean distance.
get neighbors - find the k points nearest to a given point.
assign class - poll the neighbors to assign the point to a class
def distance(x1, x2):
# we will use the numpy 2-norm to calculate Euclidean distance:
return np.linalg.norm(x1 - x2, 2) #<- the 2 is optional here since 2 is the default.
def get_neighbor_idxs(x, x_list, k):
dist_pairs = []
for i,xi in enumerate(x_list):
dist = distance(x, xi)
dist_pairs.append([dist, i, xi]) #<- gives us the distance for each point
dist_pairs.sort() #<- sort by distance
k_dists = dist_pairs[:k] #<- take the k closest points
kNN_idxs = [i for di, i, xi in k_dists] #<- we will get the indices of neighbors instead of the point itself.
return kNN_idxs
from scipy.stats import mode
def assign_class(x, x_list, y_list, k): #<- now we need to know the responses
neighbors = get_neighbor_idxs(x, x_list, k)
y_list = list(y_list) #<- this ensures that indexing works properly if y_list is a `pandas` object.
votes = [y_list[i] for i in neighbors]
assignment = mode(votes)[0][0] #<- we won't deal with ties for this simple implementation
return assignment
Now we can “wrap” all of these functions into a single function that predicts the class of an array of points:
def kNN(X, k, X_train, y_train):
y_out = []
for xi in X:
y_out.append(assign_class(xi, X_train, y_train, k))
y_out = np.array(y_out)
return y_out
Let’s see how this works on some of our toy datasets:
X = X_moons
y = y_moons
y_knn = kNN(X, 20, X, y)
fig, axes = plt.subplots(1, 2, figsize = (15, 6))
axes[0].scatter(X[:, 0], X[:, 1], c = clrs[y])
axes[0].set_title('Original Data')
axes[1].scatter(X[:, 0], X[:, 1], c = clrs[y_knn])
axes[1].set_title('kNN prediction (k = 20)');
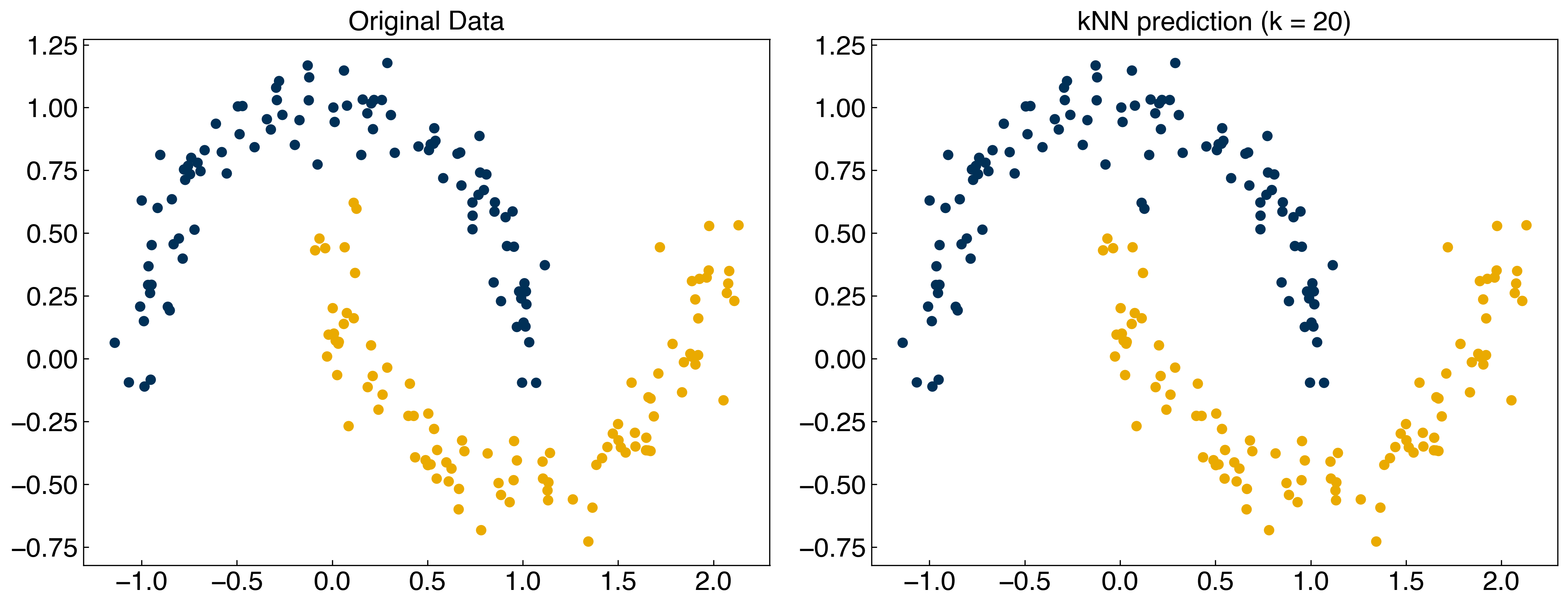
We see that the kNN model predicts the classes perfectly!
8.4.1.1. Discussion: Do you think this kNN model is reliable for new predictions?#
No. This model may be overfitted to the whole
Xdata.
Let’s try to visualize the model:
def visualize_neighbors(X, X_train, k):
## helper function to visualize neighbors
fig, ax = plt.subplots()
ax.scatter(X[:, 0], X[:, 1], color = 'k', alpha = 0.2)
ax.scatter(X_train[:, 0], X_train[:, 1], color = 'r', alpha = 0.2)
for xi in X:
neighbors = get_neighbor_idxs(xi, X_train, k)
for nj in neighbors:
xj = X_train[nj]
ax.plot([xi[0], xj[0]], [xi[1], xj[1]], ls = '-', color = 'b', alpha = 0.2)
visualize_neighbors(X, X, 20)
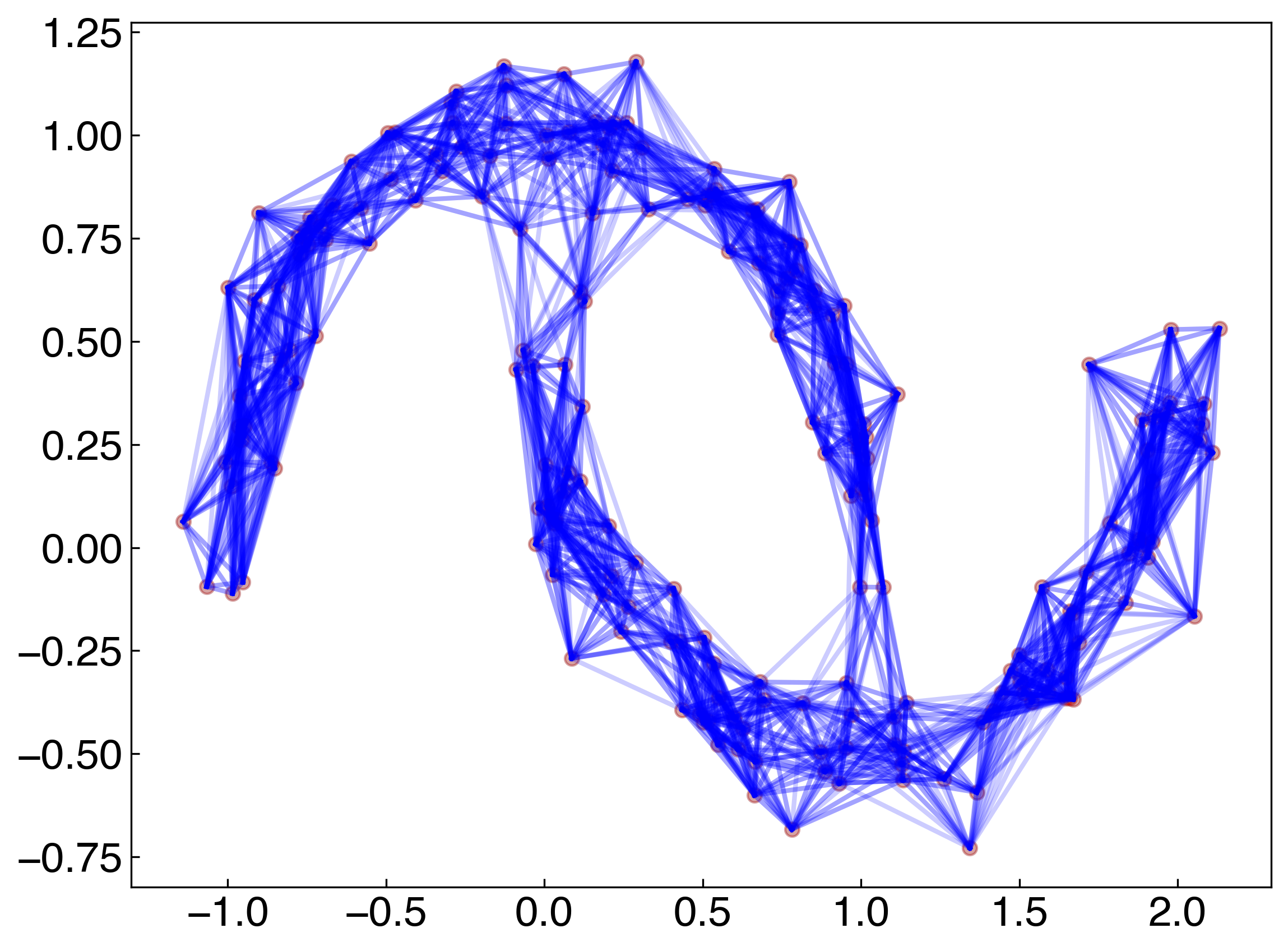
The model works well, but all of the points are training points. This means that the model has “memorized” the classes of each point, and then just uses all the data to predict the class. Let’s see what happens if we use a test-train split:
from sklearn.model_selection import train_test_split
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size = 0.33)
y_knn = kNN(X_test, 20, X_train, y_train)
fig, axes = plt.subplots(1, 2, figsize = (15, 6))
axes[0].scatter(X_test[:,0], X_test[:,1], c = clrs[y_test])
axes[0].set_title('Testing Set')
axes[1].scatter(X_test[:, 0], X_test[:, 1], c = clrs[y_knn])
axes[1].set_title('kNN prediction (k = 20)');
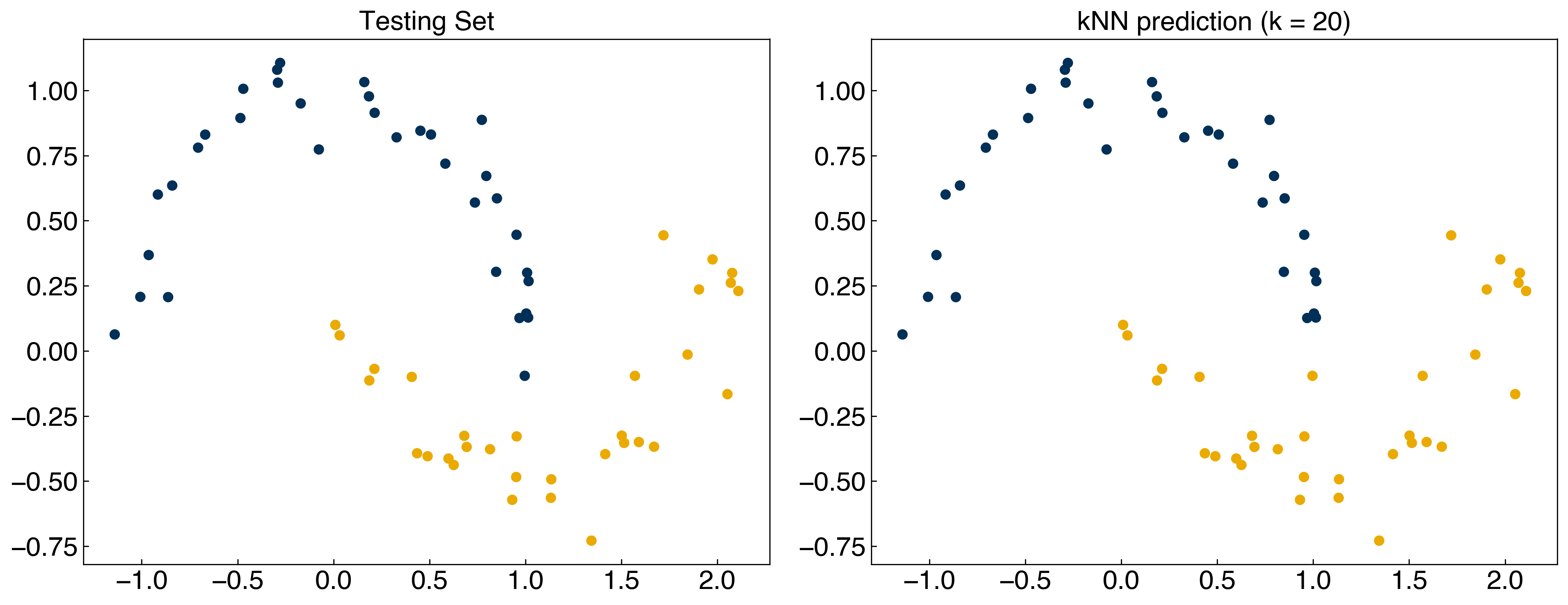
We see that the model still performs very well, even for the testing data.
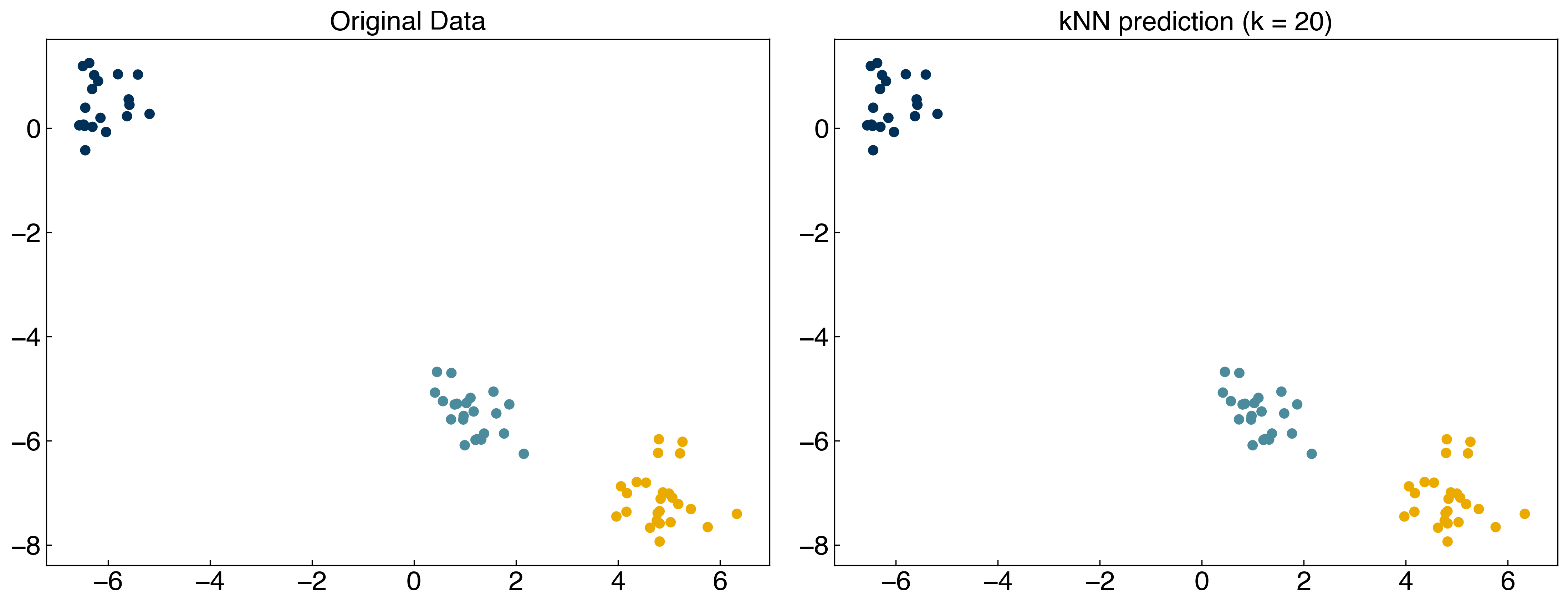
The kNN approach is very flexible, and can easily be extended to multi-class datasets, although “ties” between different classes may become more likely.
X = X_mc
y = y_mc
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size = 0.33)
y_knn = kNN(X_test, 20, X_train, y_train)
fig, axes = plt.subplots(1, 2, figsize = (15, 6))
axes[0].scatter(X_test[:, 0], X_test[:, 1], c = clrs[y_test])
axes[0].set_title('Original Data')
axes[1].scatter(X_test[:, 0], X_test[:, 1], c = clrs[y_knn])
axes[1].set_title('kNN prediction (k = 20)');
8.4.1.2. Discussion: Which part of the code is training the model? What are the hyperparameters of the model?#
We actually do not train the model. There is no loss function.
kand distance metrics are commonly tuned hyperparameters.
We can also use the scikit-learn implementation:
from sklearn.neighbors import KNeighborsClassifier
knn = KNeighborsClassifier(n_neighbors = 20)
knn.fit(X, y)
y_predict = knn.predict(X)
fig, axes = plt.subplots(1, 2, figsize = (15, 6))
axes[0].scatter(X[:, 0], X[:, 1], c = clrs[y])
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, 0.1), np.arange(y_min, y_max, 0.1))
Z = knn.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
axes[1].contourf(xx, yy, Z, alpha = 0.4)
axes[1].scatter(X[:, 0], X[:, 1], c = clrs[y_predict])
axes[0].set_title('Original Data')
axes[1].set_title('kNN Prediction (k = 20)');
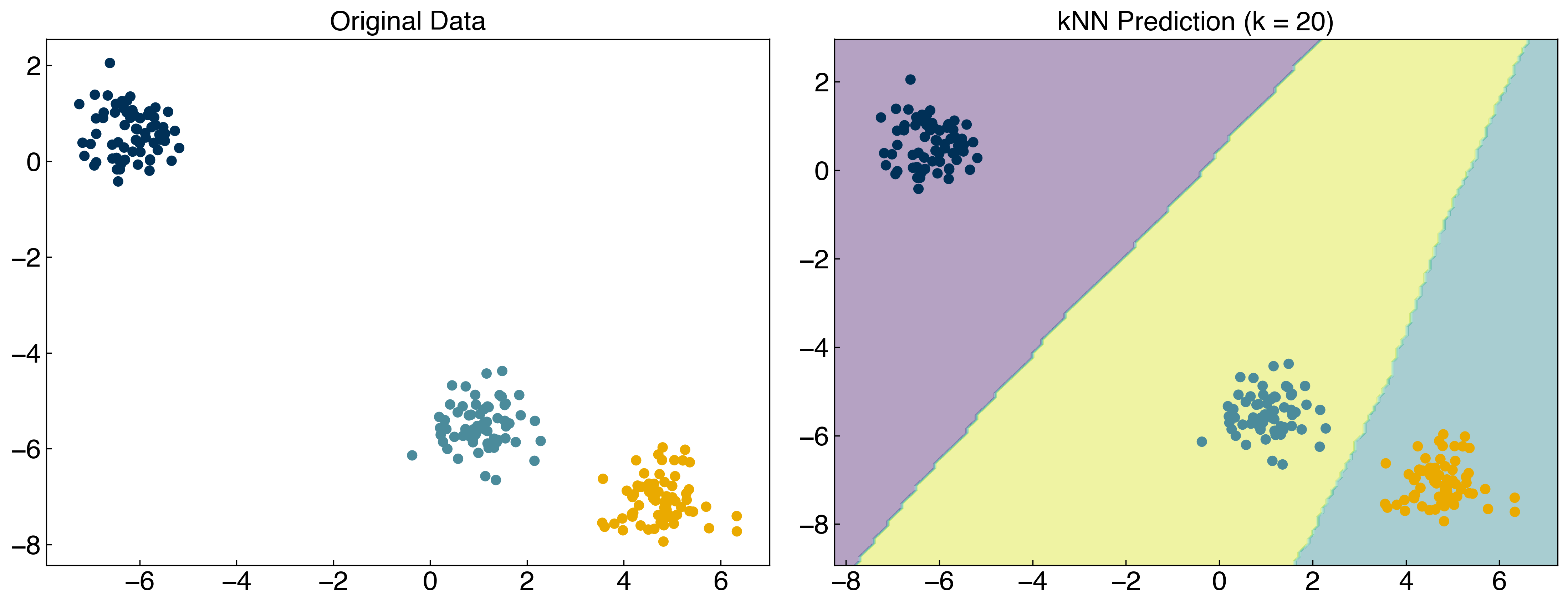
This will make it easier to optimize hyperparameters and compare models. It is also generally more efficient.
8.4.1.3. kNN advantages and disadvantages#
Advantages
Simple to understand/implement
Intuitive
Highly non-linear class boundaries
Disadvantages
Slow for large training sets and/or high dimensions
Difficult to interpret in high dimensions
8.4.2. Naive Bayes Classification#
A totally different approache is the “Naive Bayes” classifier, which is a generative model. The model is “naive” because it naively assumes that the data in each class follows a Gaussian distribution, and that the features are not correlated.
Under these assumptions, the Gaussian distribution for each class gives the probability function for \(y\) (class) as a function of \(X\) (features):
\(P(\vec{x}|y_i) \sim \exp\left(\sum_j \frac{(x_j - \mu_i)^2}{2 \sigma_i^2}\right)\)
where \(\mu_i\) is the mean (centroid) of class \(i\), and \(\sigma_i\) is the standard deviation of class \(i\).
This can be used with Bayes’ formula to estimate \(P(y_i|\vec{x})\):
\(P(y_i|\vec{x}) = \frac{P(\vec{x}|y_i) P(y_i)}{P(\vec{x})}\)
The code block below will visualize this. You don’t need to understand how it works, but as usual should understand the output:
fig, ax = plt.subplots()
ax.set_title('Naive Bayes Model', size = 14)
xlim = (-8, 8)
ylim = (-15, 5)
xg = np.linspace(xlim[0], xlim[1], 60)
yg = np.linspace(ylim[0], ylim[1], 40)
xx, yy = np.meshgrid(xg, yg)
Xgrid = np.vstack([xx.ravel(), yy.ravel()]).T
cmaps = ['Blues', 'YlOrBr', 'BuGn']
## Don't worry if this doesn't exactly make sense
for label, color in enumerate(clrs[:3]):
mask = y == label
ax.scatter(X[mask][:, 0], X[mask][:, 1], c = color, alpha = 0.1)
mu, std = X[mask].mean(0), X[mask].std(0) #<- here is the key part: take the mean/stdev of each class.
P = np.exp(-0.5 * (Xgrid - mu) ** 2 / std ** 2).prod(1)
Pm = np.ma.masked_array(P, P < 0.03)
ax.pcolorfast(xg, yg, Pm.reshape(xx.shape), alpha = 0.5, cmap = cmaps[label])
ax.contour(xx, yy, P.reshape(xx.shape),
levels = [0.01, 0.1, 0.5, 0.9],
colors = color, alpha = 0.2)
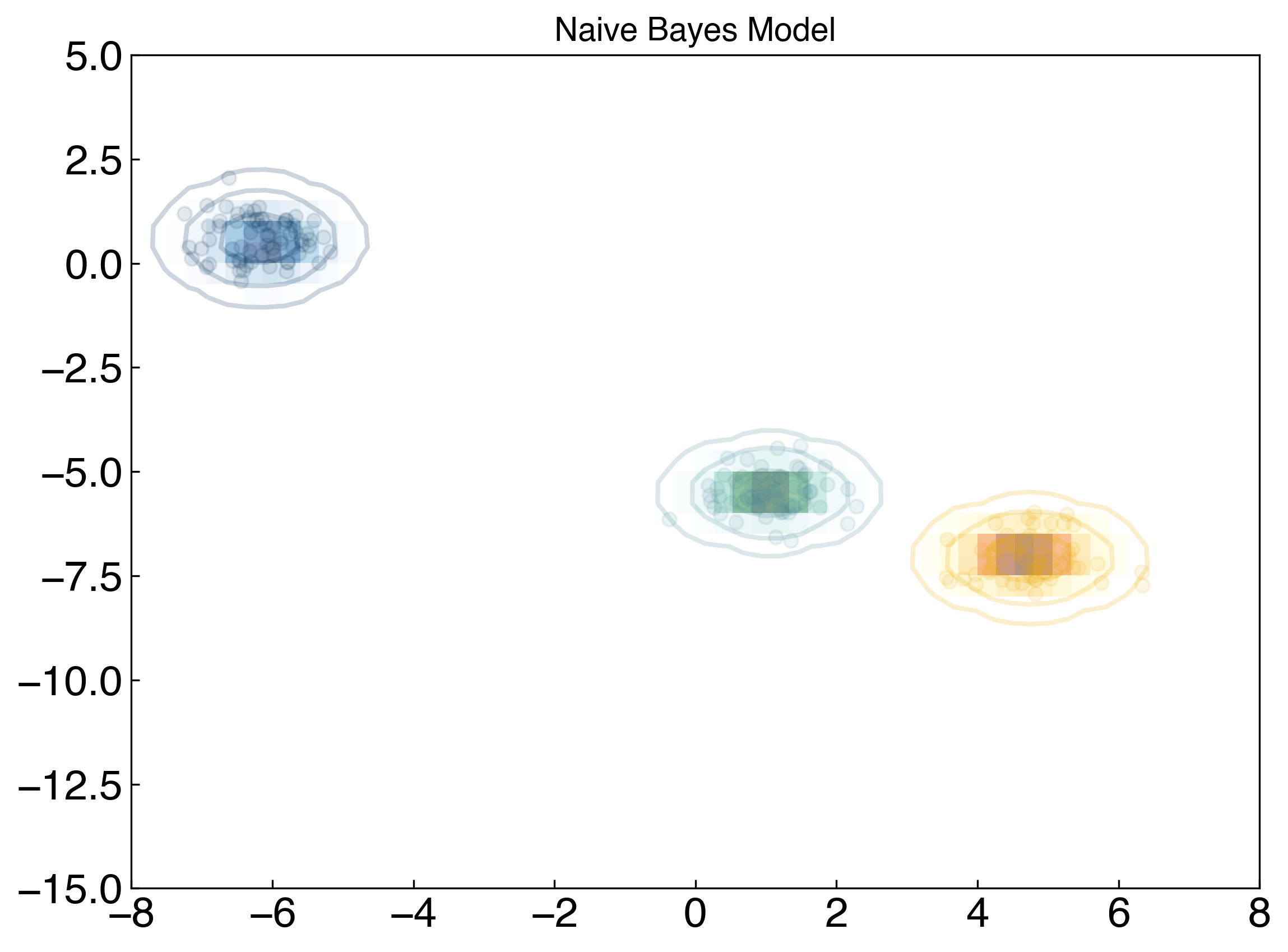
This is a generative model because we are now (assuming) we know the distribution from which each class was drawn. We can then use this probability distribution to assess the relative probability that any new point belongs to each class.
We will not implement the model here, but will use the scikit-learn implementation:
from sklearn.naive_bayes import GaussianNB
NB = GaussianNB()
NB.fit(X, y)
y_predict = NB.predict(X)
fig, axes = plt.subplots(1, 2, figsize = (15, 6))
axes[0].scatter(X[:, 0], X[:, 1], c = clrs[y])
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, 0.1), np.arange(y_min, y_max, 0.1))
Z = NB.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
axes[1].contourf(xx, yy, Z, alpha = 0.4)
axes[1].scatter(X[:, 0], X[:, 1], c = clrs[y_predict])
axes[0].set_title('Original Data')
axes[1].set_title('Naive Bayes Prediction');
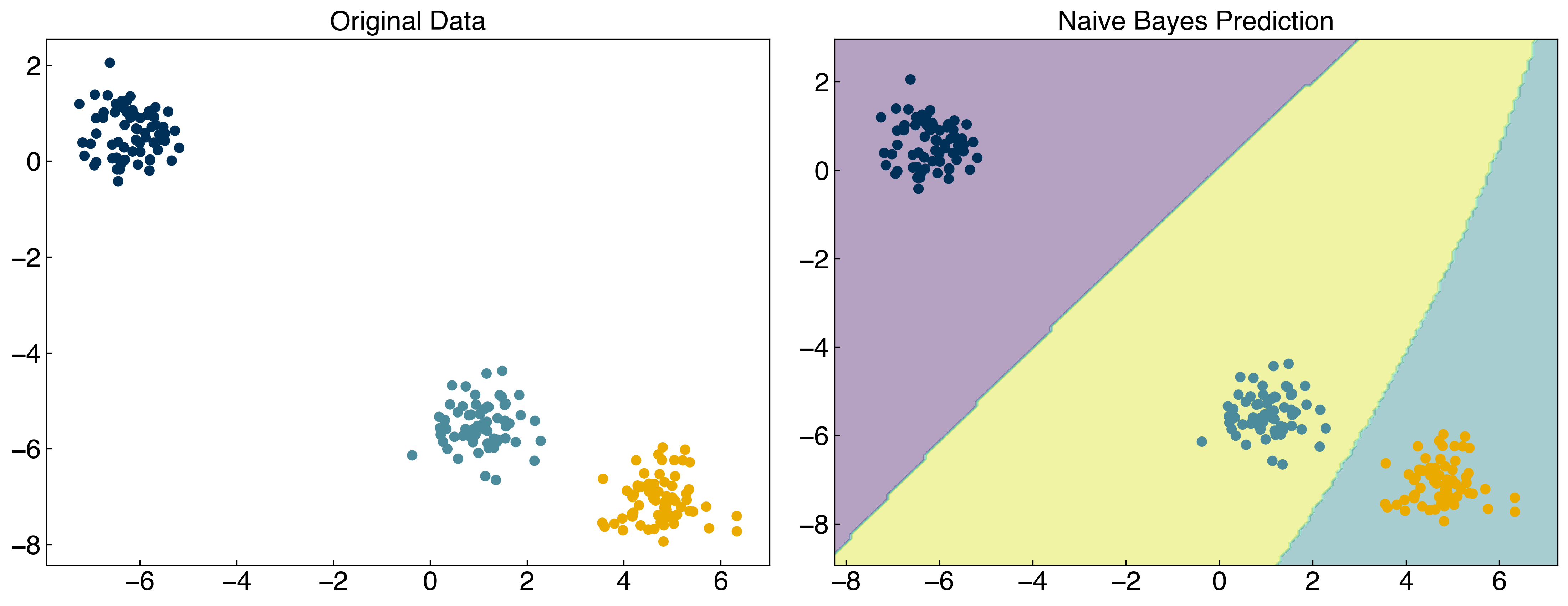
Naive Bayes works well for linearly-separable datasets where the classes follow Gaussian distributions, but will not work well for highly non-linear datasets. There is a “not so naive” extension that can be used once more sophisticated models for the underlying class distributions are known, but this is beyond the scope of this lecture.
8.4.2.1. Discussion: Is Naive Bayes a parametric or non-parametric model?#
It is a parametric model. Naïve Bayes models need the mean and standard deviation for each feature as parameters. Therefore, the number of parameters will depend on the number of features, which will not change due to the size of the dataset.
8.4.2.2. Naive Bayes advantages and disadvantages:#
Advantages:
Difficult to overfit
Probabilistic predictions
Can easily re-sample to correct class imbalance
Disadvantages:
Decision boundaries are quadratic (often nearly linear in practice)
8.4.3. Decision Trees#
Decision trees are a very powerful type of discriminative classification algorithm, and they are relatively easy to interpret. They also have the advantage of working well with discrete input variables (e.g. discrete feature spaces). Essentially, a decision tree checks each input variable and attempts to make a discrete “cut” in that variable to decide which class it belongs in. It then repeates this process with other variables until the training data can be separated into the correct classes. In a sense, it breaks the problem into a lot of 1-dimensional classification models and repeats the process recursively. The way that the decision point is determined is slightly different than what we saw for generalized linear models, and is usually based on information theory concepts like gini criteria or information entropy. We will not go into the details here.
The disadvantage of decision trees is that they are very prone to over-fitting, because variables can be used more than once. The “Random forest” approach overcomes this by training an ensemble of decision trees with subsets of the data (similar to the “bootstrapping” we saw before) and using this ensemble of models to produce an estimate.
We will not go into the theory of decision trees here, but we will show a brief example using the toy datasets with the scikit-learn implementation.
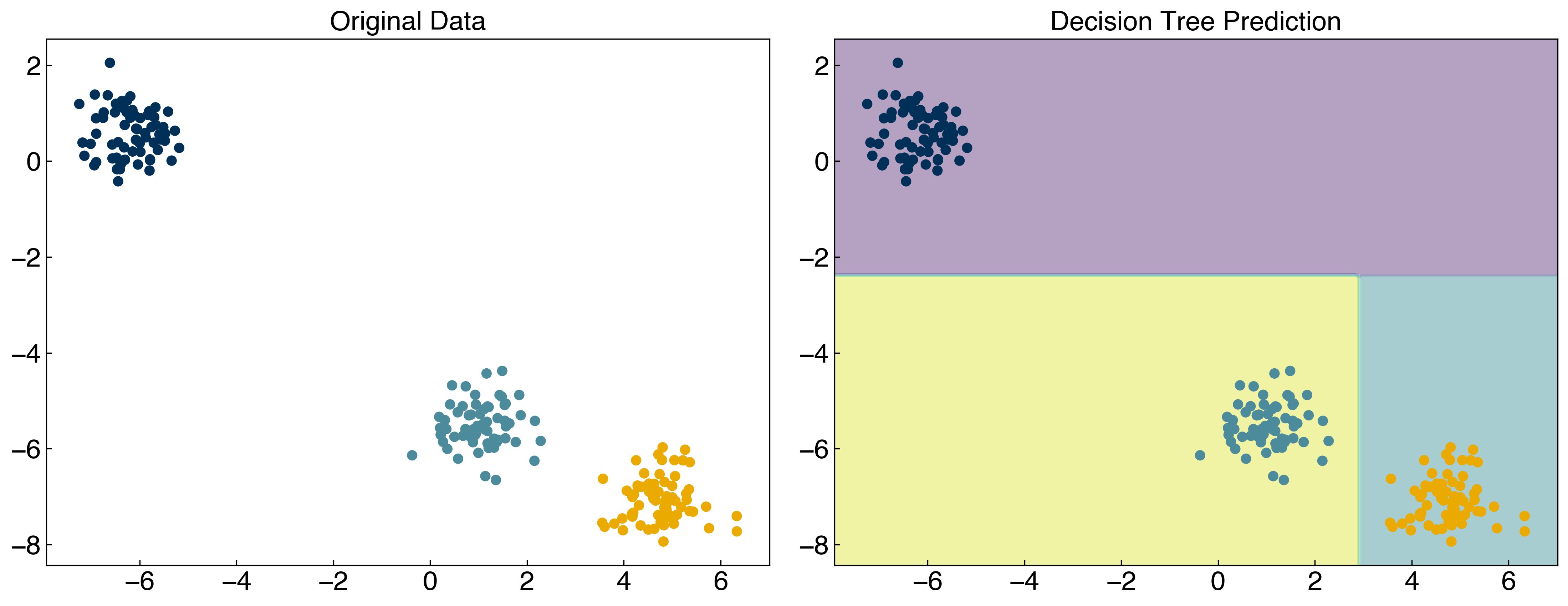
from sklearn.tree import DecisionTreeClassifier
tree = DecisionTreeClassifier()
X = X_mc
y = y_mc
tree.fit(X, y)
y_tree = tree.predict(X)
fig, axes = plt.subplots(1, 2, figsize = (15, 6))
axes[0].scatter(X[:, 0], X[:, 1], c = clrs[y])
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, 0.1), np.arange(y_min, y_max, 0.1))
Z = tree.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
axes[1].contourf(xx, yy, Z, alpha = 0.4)
axes[1].scatter(X[:, 0], X[:, 1], c = clrs[y_tree])
bottom, top = axes[0].get_ylim()
axes[1].set_ylim(bottom, top)
left, right = axes[0].get_xlim()
axes[1].set_xlim(left, right)
axes[0].set_title('Original Data')
axes[1].set_title('Decision Tree Prediction');
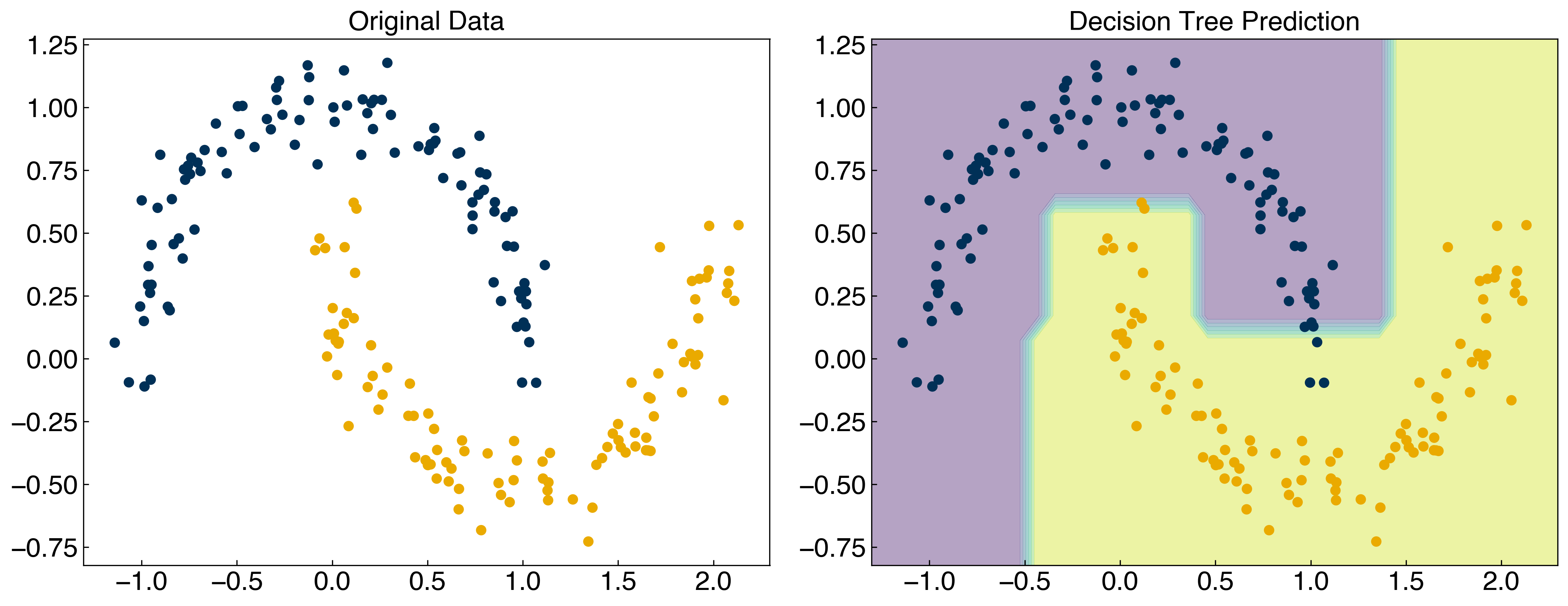
X = X_moons
y = y_moons
tree.fit(X, y)
y_tree = tree.predict(X)
fig, axes = plt.subplots(1, 2, figsize = (15, 6))
axes[0].scatter(X[:, 0], X[:, 1], c = clrs[y])
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, 0.1), np.arange(y_min, y_max, 0.1))
Z = tree.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
axes[1].contourf(xx, yy, Z, alpha = 0.4)
axes[1].scatter(X[:, 0], X[:, 1], c = clrs[y_tree])
bottom, top = axes[0].get_ylim()
axes[1].set_ylim(bottom, top)
left, right = axes[0].get_xlim()
axes[1].set_xlim(left, right)
axes[0].set_title('Original Data')
axes[1].set_title('Decision Tree Prediction');
from io import StringIO
from IPython.display import Image
from sklearn.tree import export_graphviz
import pydotplus
dot_data = StringIO()
export_graphviz(tree, out_file = dot_data,
filled = True, rounded = True,
special_characters = True)
graph = pydotplus.graph_from_dot_data(dot_data.getvalue())
Image(graph.create_png())
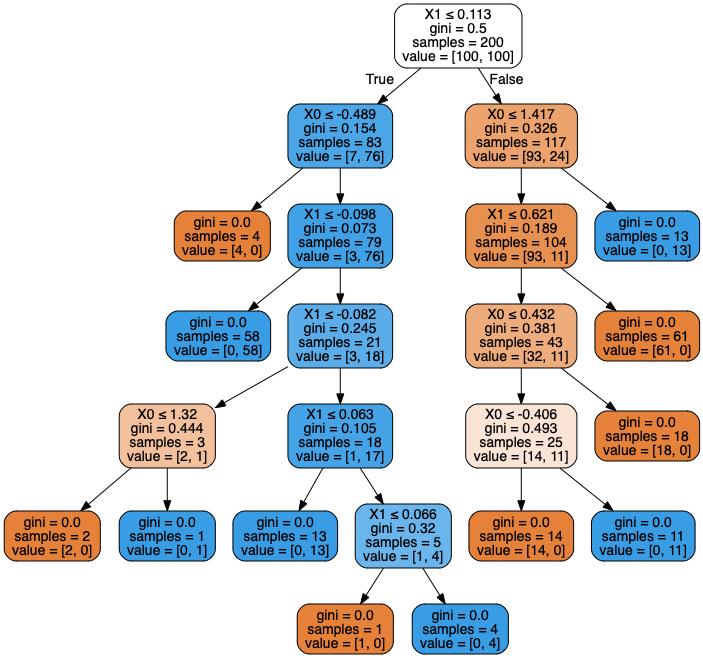
8.4.3.1. Decision trees advantages and disadvantages:#
Advantages:
Intuitive interpretation of model
Able to predict highly non-linear boundaries
Disadvantages:
Easily over-fit
Training can be expensive for large or high-dimensional data
Predictions are discrete rather than continuous (boundaries are not smooth)
8.4.4. Conclusion#
There are many types of classification algorithms available, but most are based on concepts similar to these. In practice, it is typical to compare the performance, training time, and prediction time for various classifiers to determine the best model, since it can be difficult to predict which approach will be best.